Karan Bajpai
RC Crawler Project
About This Project
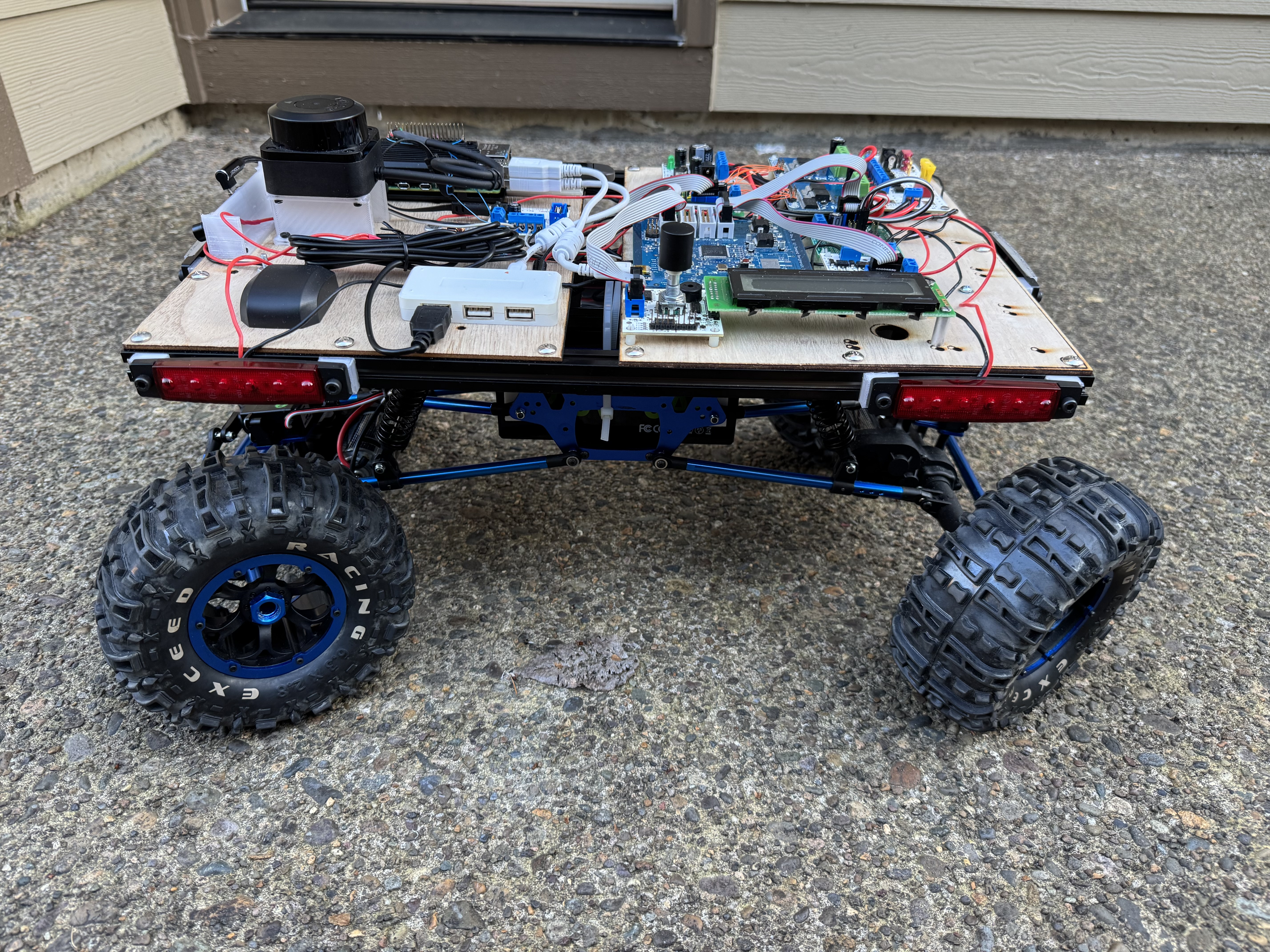
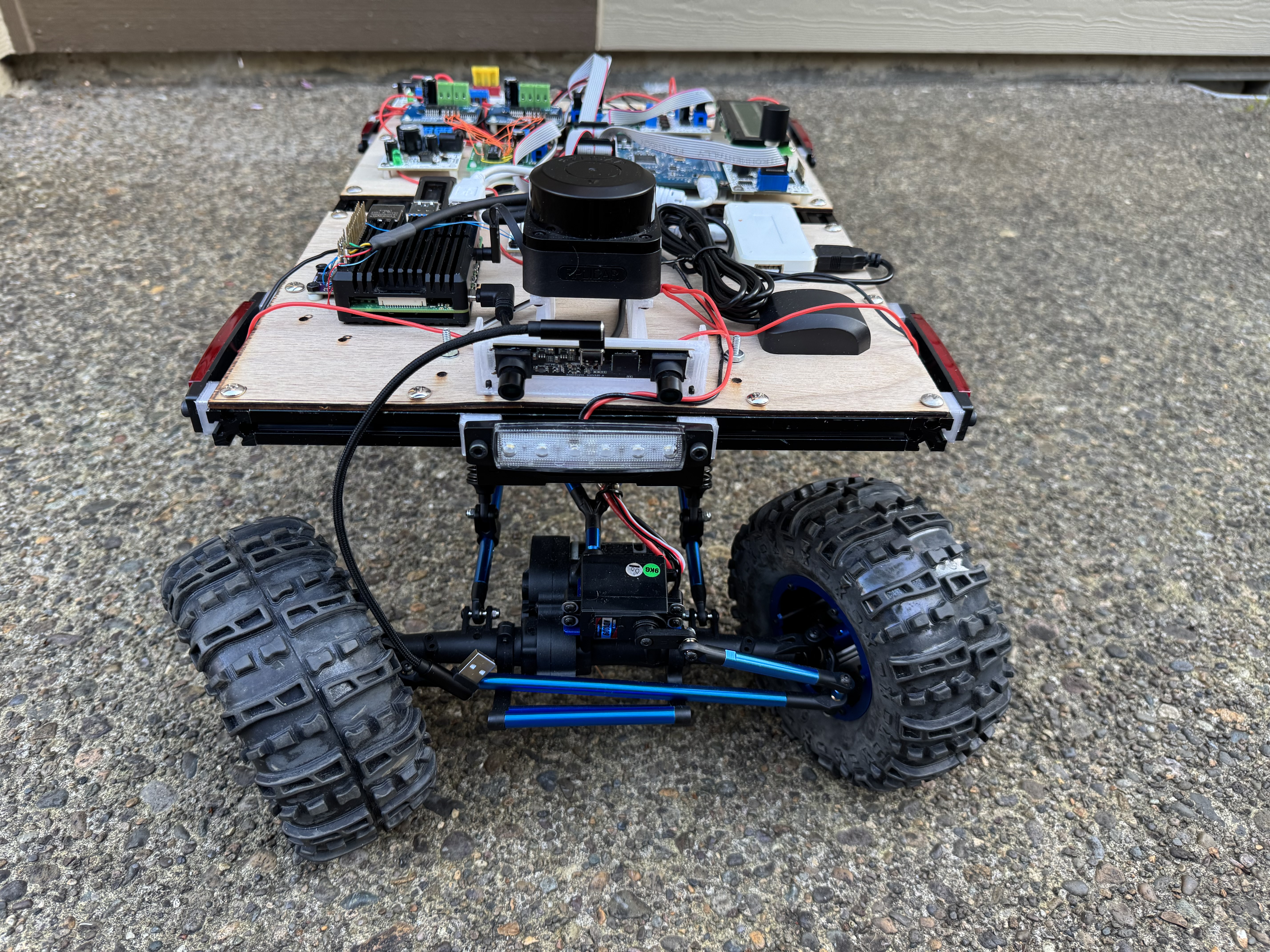
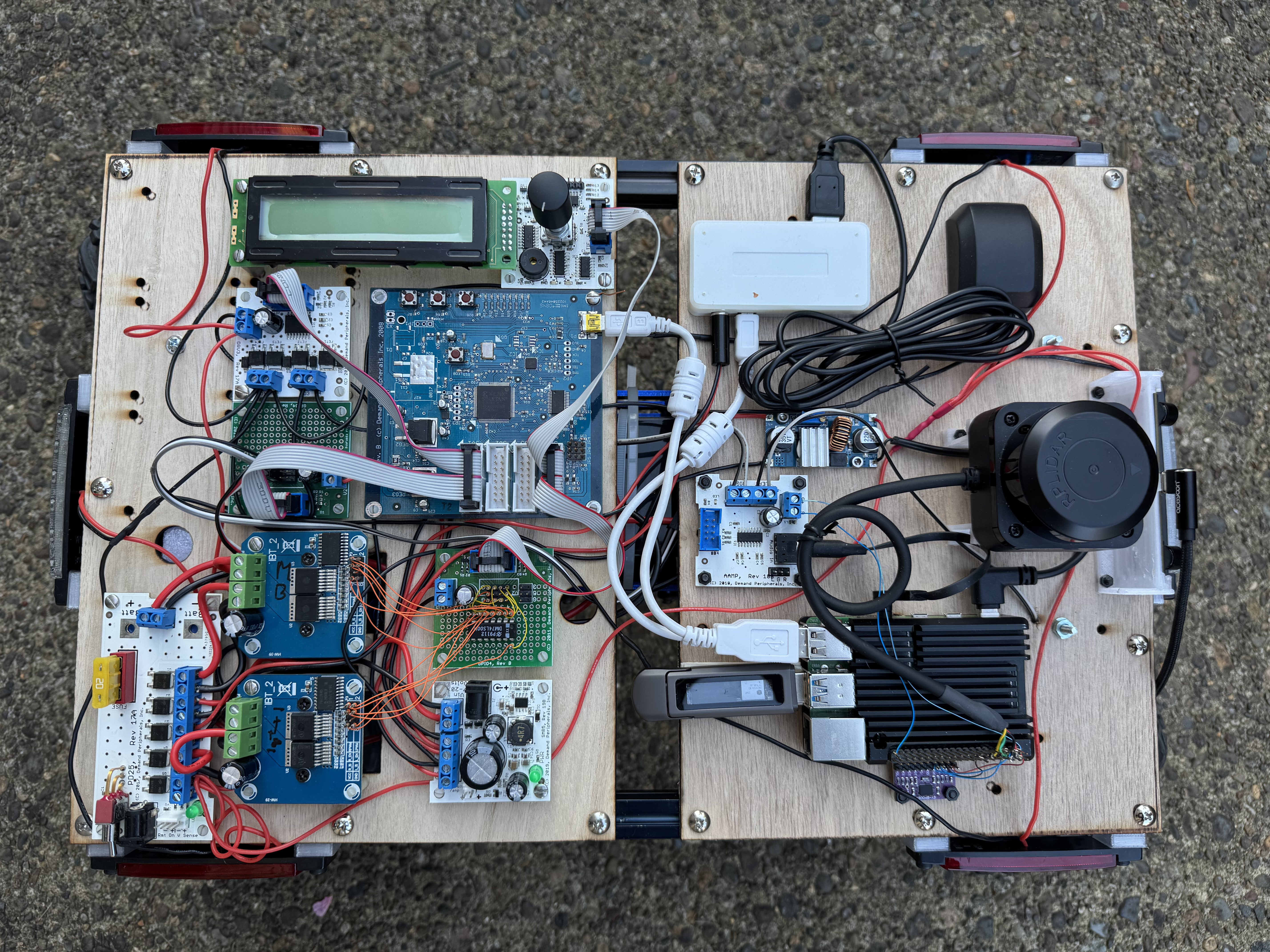
This is an ongoing robotics project featuring a custom-built RC crawler powered by a Raspberry Pi running Ubuntu Linix. The crawler is being developed using ROS 2 nodes for autonomy. It's equipped with a 2D LiDAR for mapping and obstacle detection, an IMU for orientation tracking, and a camera for visual feedback. The system controls a range of components including DC motors, stepper motors, servo motors, speakers, and LED lights. Additionally, an oboard FPGA will eventually integrate with all major systems to enable low-latency hardware-level coordination. This crawler is a work in progress, and I'm continually developing both the software and hardware to expand its capabilities.